Abstract
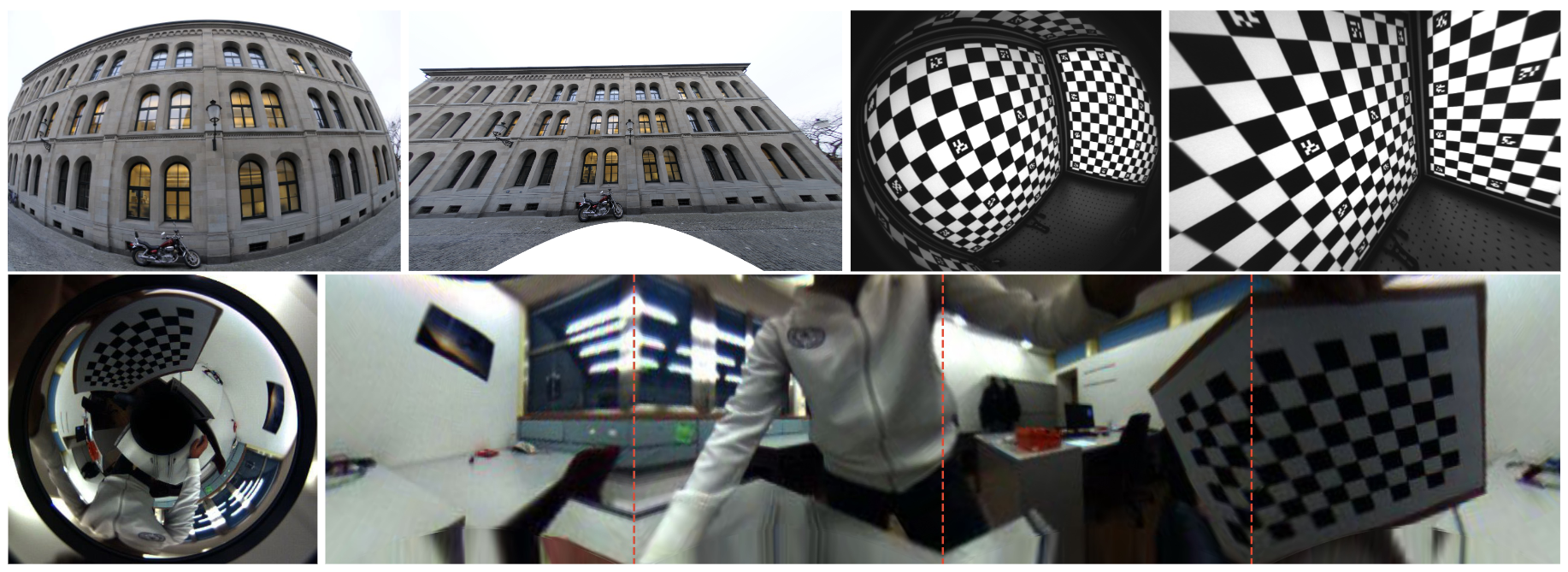
Low-dimensional parametric models are the de-facto standard in computer vision for intrinsic camera calibration. These models explicitly describe the mapping between incoming viewing rays and image pixels. In this paper, we explore an alternative approach which implicitly models the lens distortion. The main idea is to replace the parametric model with a regularization term that ensures the latent distortion map varies smoothly throughout the image. The proposed model is effectively parameter-free and allows us to optimize the 6 degree-of-freedom camera pose without explicitly knowing the intrinsic calibration. We show that the method is applicable to a wide selection of cameras with varying distortion and in multiple applications, such as visual localization and structure-from-motion.
Video
Results
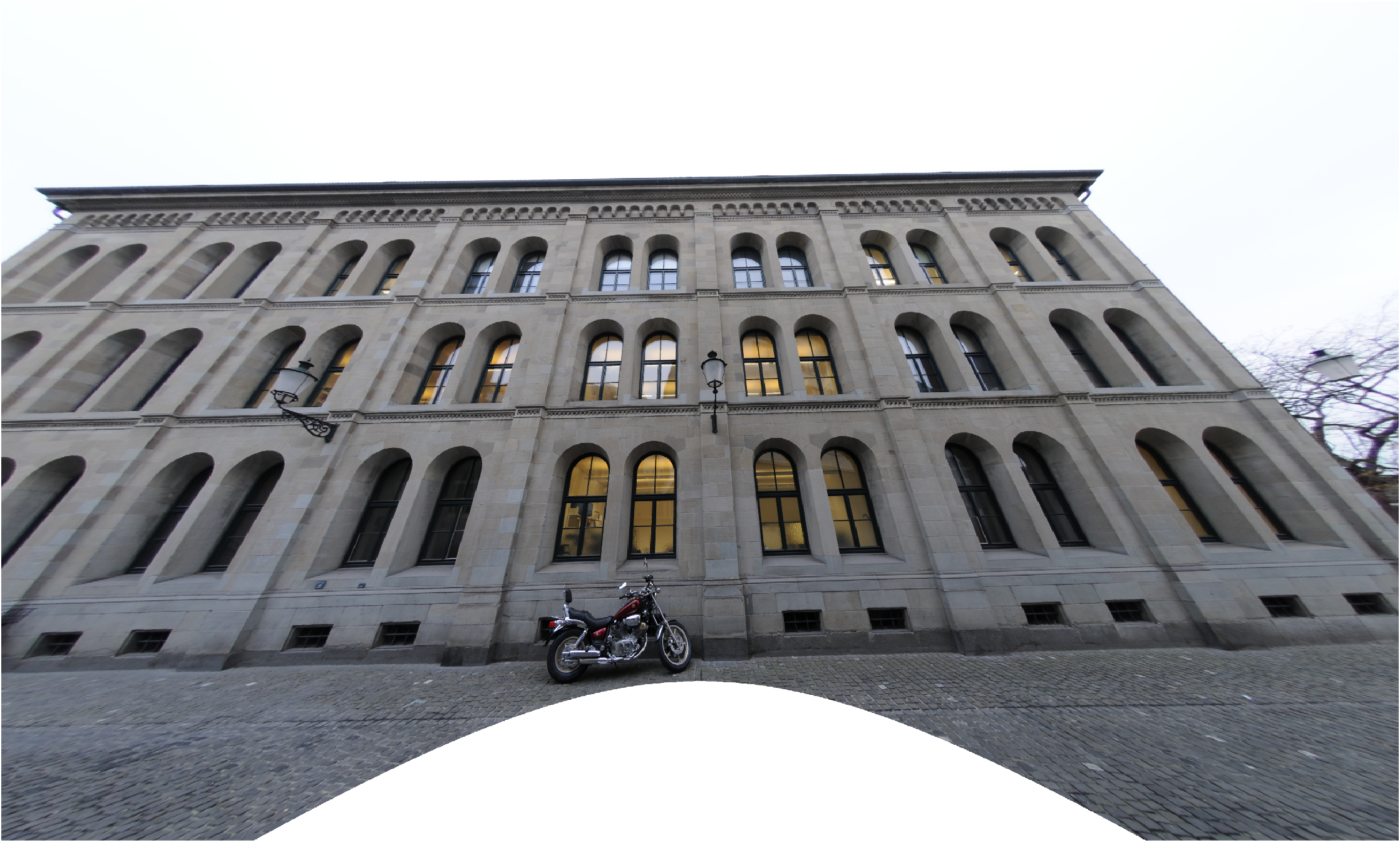
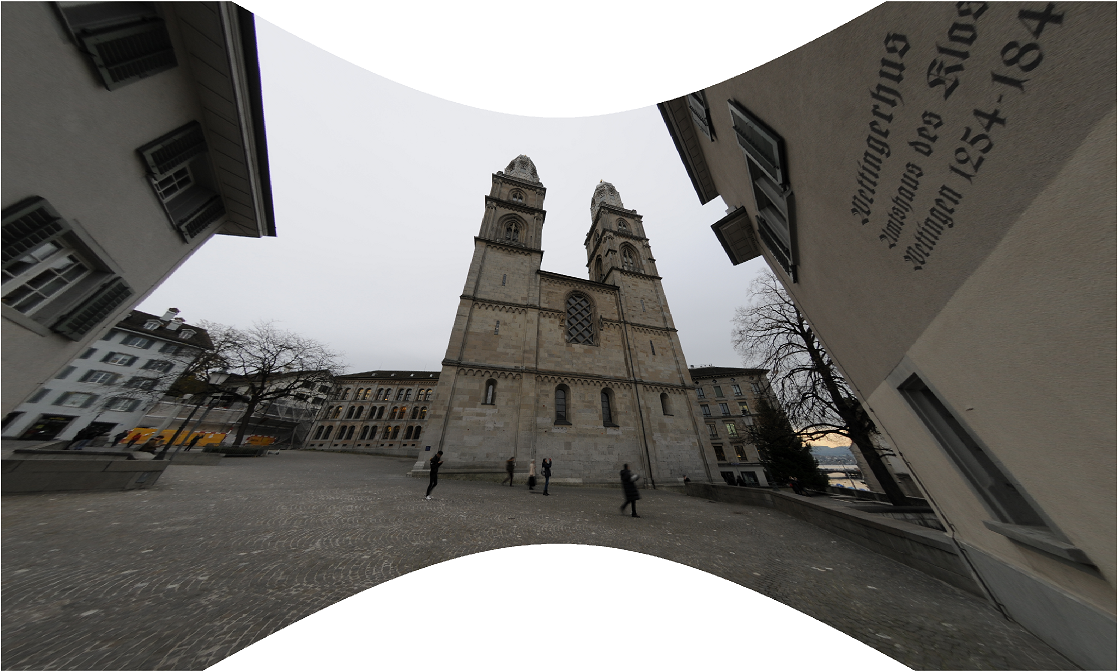
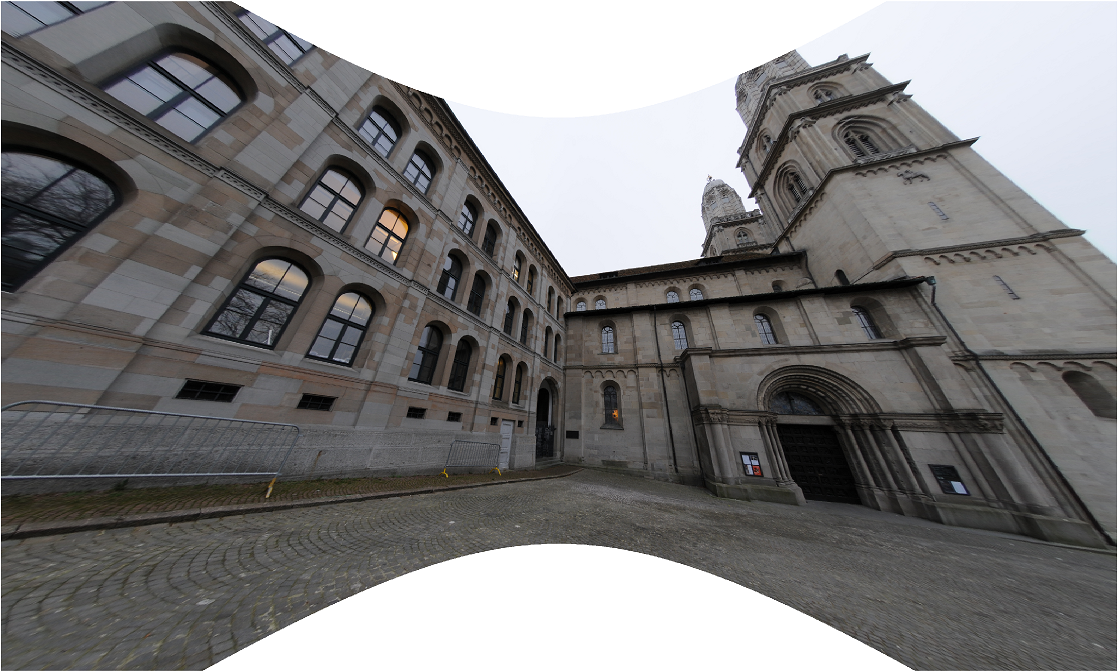
| Original Image |
Undistorted Result |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |