Abstract
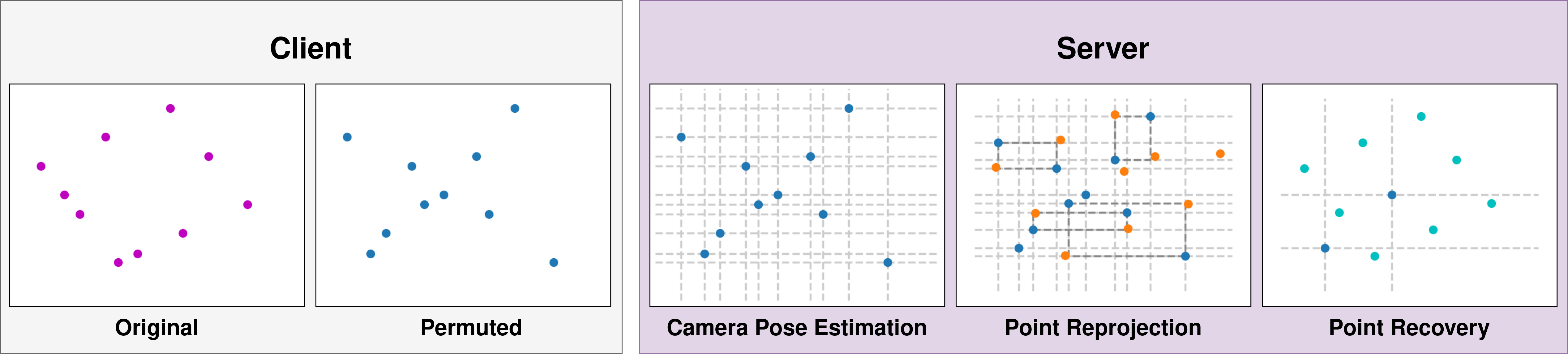
Recent methods on privacy-preserving image-based localization use a random line parameterization to protect the privacy of query images and database maps. The lifting of points to lines effectively drops one of the two geometric constraints traditionally used with point-to-point correspondences in structured-based localization. This leads to a significant loss of accuracy for the privacy-preserving methods. In this paper, we overcome this limitation by devising a coordinate permutation scheme which allows for recovering the original point positions during pose estimation. The recovered points provide the full 2D geometric constraints and enable us to close the gap between privacy-preserving and traditional methods in terms of accuracy. Another limitation of random line methods is their vulnerability to density based 3D line cloud inversion attacks. Our method not only provides better accuracy than the original random line based approach but also provides stronger privacy guarantees against these recently proposed attacks. Extensive experiments on standard benchmark datasets demonstrate these improvements consistently across both scenarios of protecting the privacy of query images as well as the database map.
Video
Pipeline
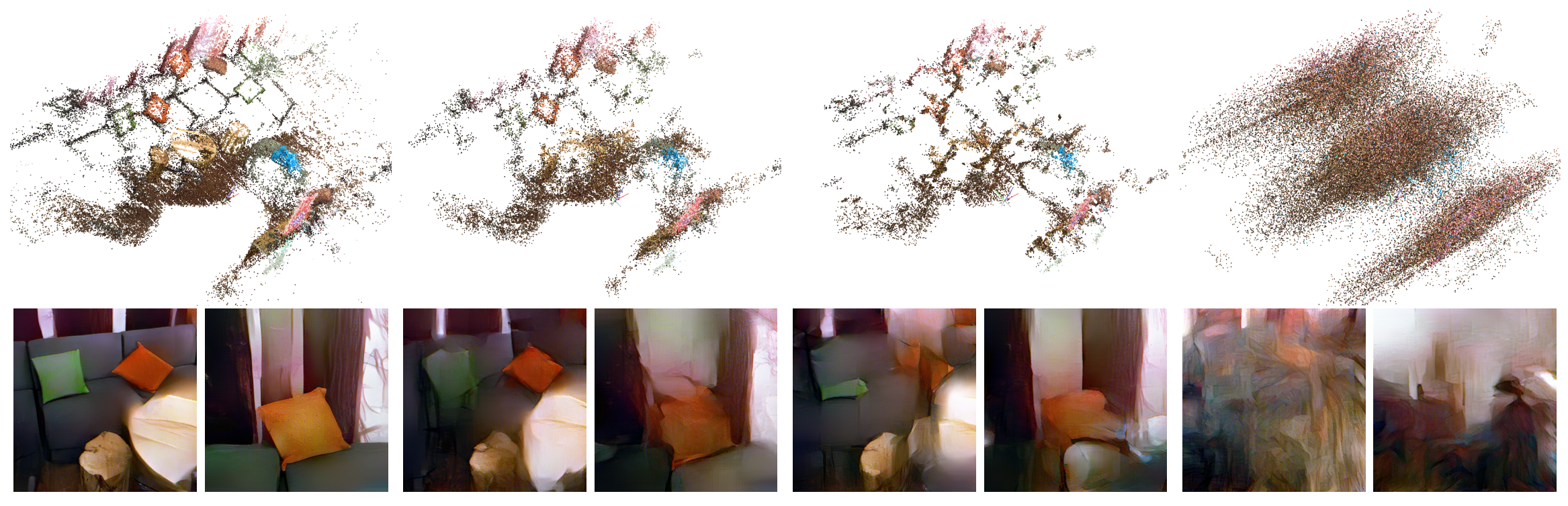
Results